Appearance
摄像视觉
记录折腾计算视觉中的视觉部分资料
理论
名词
- 常见说明
- 光圈: 光圈大小,决定进光量。值为镜头的焦距和光圈直径大小
- iso: 曝光敏感度
- 焦距:光学系统中衡量光的聚集或发散的度量方式,指从透镜中心到光聚集之焦点的距离,从镜片光学中心到成像平面的距离。具有短焦距的光学系统比长焦距的光学系统有更佳聚集光的能力
- 对焦:调整合焦面距离
- 变焦:调整焦距
- 等效焦距:相机镜头标称焦距一般以全画幅为标准,实际传感器尺寸可能为中画幅、残幅、一寸、1/2.3 寸规格。这个只是对视场角的描述
- 量子效率/QE:量子效率是描述光电器件光电转换能力的一个重要参数,它是在某一特定波长下单位时间内产生的平均光电子数与入射光子数之比
- 前照式/背照式:cmos 的电路放在光电传感器的前后,放在后面的不影响光通量,量子效率更好
- 堆栈式:光电传感器和模电转换模块使用不同制程,高制程的模电转换模块的图像处理速度得到了大幅提高
- 海康工业相机定义
- 靶面尺寸:CMOS 的对角线尺寸,像元尺寸与分辨率共同决定了相机靶面的大小
- 像元尺寸:1 个像元的尺寸,是组成图像的最小单元
- 快门类型:分为全局快门和卷帘快门:前者每一行同时开始并结束曝光,曝光完成后,数据逐行读出。后者在一行曝光结束后,立即读出数据,完全读出后,下一行开始读出
- 分辨率:决定图像的精细程度,一般情况下,图像的分辨率越高,所包含的像素就越多,图像就越清晰
- 帧率:每秒传输帧数,以 fps 为单位
- 行频:每秒钟在水平方向扫描的次数,以 Hz 为单位
- 曝光时间:从快门打开到关闭这段时间内光线照射到感光芯片的时间,通过调整曝光时间可改变图像亮度
- 响应波段:红外相机可接受的波长范围
- 热灵敏度:红外相机可以分辨的最小温差, 以 mk 为单位
- 总线接口:采集卡与工控机链接的接口,常用接口包括 PCI、PCI-E
- 总线接口性能:采集卡与工控机之间数据传输性能,指标包括总线宽度、总线时钟、最大传输速率,总线宽度越宽、时钟频率越大、传输速率越快单位时间内传输的数据越多
- 相机接口速率:相机与工控机或采集卡之间的数据传输速度
- 焦距:光学系统的后主平面到成像平面的距离,表示光学系统聚集光线能力
- 光圈范围:相机镜头上的光圈开到最大和最小的范围。光圈是用来控制光线透过镜头,进入机身内感光面的光量的装置
- 视场角:以镜头为顶点,以被测目标的物像可通过镜头的最大范围的两条边缘构成的夹角
- 畸变:光学系统对物体所成的像相对于物体本身而言的失真程度
- 最近摄距:镜头的最近拍摄距离
- 滤镜螺纹:镜头前端用于装配滤镜的螺纹类型
- 镜头接口:相机连接镜头的机械接口类型
镜头转接
等效焦距和等效光圈
实际上不存在所谓的等效焦距和等效光圈,焦距和光圈是镜头的固有属性
等效焦距实质为把视角等效为全幅(125 画幅)的 cmos,在相同视角大小时需要使用什么焦距的镜头。等效光圈实际也是为等效虚化程度
比如对于一个 1 寸的 cmos 来说,一个全画幅的 50mm 镜头相比一个 1 寸工业镜头的成效大小差距不是 50/70x2.7,而是 50/70
镜头和画幅选择
镜头是全幅、残幅、1 寸指的是设计像场大小(不是实际像场大小)的覆盖大小。由于小画幅相机的像素密度更高,像场也更小,因此同等焦距光圈下,更大画幅的镜头除了单位分辨率难以满足外,也浪费了很大体积用来提供更大的像场
因此更大画幅的镜头给小画幅相机使用时除了暗角会得到改善外,只会成像效果更差,体积更大。除非是复用现有高素质镜头或者是现有镜头群不满足外,不应当选用更大画幅的镜头
视场角
以下是全画幅相机接入镜头的视场角
| 焦距(mm) | 视场角(°) | 备注 |
|---|---|---|
| 14 | 114 | |
| 20 | 94 | |
| 24 | 84 | |
| 28 | 75 | |
| 35 | 63 | |
| 50 | 46 | |
| 70 | 34 | |
| 80 | 30 | |
| 85 | 28.30 | |
| 100 | 24 | |
| 135 | 18 | |
| 200 | 12 | |
| 300 | 8.15 | |
| 400 | 6.10 | |
| 500 | 5 | |
| 600 | 4.10 | |
| 800 | 3.05 | |
清晰成像
曝光
一张动态范围最大的照片不等于最好的照片,可能需要依据测光表来调整
超焦距
对焦在远处的某一点,使得景深的另一极端恰为”无限远“,则由"无限远"(∞)到景深范围内最近的摄影距离,称为「超焦距离」。若先将焦点设为超焦距离,则由超焦距离的一半开始,到无限远处,都落在景深范围之内
公式为焦距+(焦距 x 焦距)/(弥散圆直径 x 光圈),弥散圆直径一般在 1/30mm-1/40mm 之间,两个像素点
单个像素大小的超焦距计算公式:焦距x焦距/光圈/像素尺寸
以 IMX183 为例,135mm f1.4 的镜头超焦距距离约等于 5500 米。按照相机计算则 183 米往后基本都合焦
噪声
噪声这一块实际上杂糅了很多不同来源而又相互贯通的内容。仔细读下来,实际上与原有考虑的最低 ISO+极限曝光时长+后期明暗调节不同。实际上应当是通光量 x 时间调整到合适的值,再通过 ISO 调节明暗,后期进行高级处理而非明暗调节。后一种方法反而能保留最多细节
噪点术语
- 弱光噪点:与拍摄条件有关,数码相机不需要做过多区分,提升通光量
- 明度噪点:明度噪点呈现为颗粒状,没有颜色,和传统胶片上的颗粒十分相近
- 彩色噪点:彩色噪点的大小会是亮度噪点的数倍至数十倍,呈现为色斑,通常为洋红色或绿色,由于信噪比决定了彩色噪点的多少,导致这类噪点主要存在于图像中的暗部
- 相机噪点:由于制造问题导致,可以采取降温解决或优化设置解决
- 热噪点:热噪点呈现为带有颜色的亮点状,它是由于长时间曝光产生,感光元件长时间运作,致使温度升高,图像就会于某个固定位置出现光点
- 带状噪点:主要产生于芯片移位寄存器读取数据的过程。过亮的阴影区域和白平衡设置都可能导致带状噪点的产生
信噪比
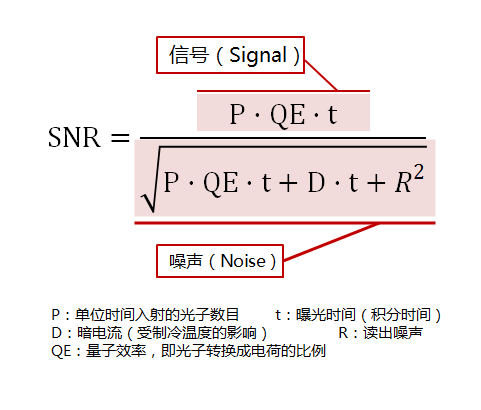
公式中的分子部分就是"信号",单位时间的入射光子数目(P,即信号的强度)乘以曝光时间(t),即为入射光子的总数目,其中有一定比例(QE,量子效率)被相机转换为电荷,最终称为相机成像的"信号"。公式中的分母部分是"噪声",分成三个组成部分
- 第一个部分是来自"真实信号"的散粒噪声——√P·QE·t. (如何理解这个"散粒噪声"呢?比如原始的光信号对应每秒钟 100 个光子落到一个像素上,但实际的情况却有可能是第一个一秒钟,落下了 97 个光子;第二个一秒钟落下了 104 个光子;第三个一秒钟落下来 101 个光子;等等等等。这种不确定性就是散粒噪声的来源)
- 第二个部分是来自暗电流的散粒噪声——√D·t.由于相机的芯片是 Si(或者 InGaAs 等其他材料),只要不是绝对零度,电子的热运动都会有几率被当成"信号"读出——称之为暗电流。暗电流可以随着时间而积累。虽然暗电流是可能通过后期算法给扣除的,但是其不确定性,或者说来自于暗电流的散粒噪声却无法消除
- 第三个部分是读出噪声——R。读出噪声的来源很多,实际操作中,将相机的盖子关闭(即没有任何光信号),采用最短的曝光时间(尽可能排除暗电流/暗噪声的影响)所得到的图像中的像素值的不确定性就被记为读出噪声。读出噪声是一个笼统但是很有实用性的概念——尤其在高速弱光成像中,因为此时曝光时间很短,所以暗电流/暗噪声都很小,主要的噪声来源就是读出噪声
由于以上三种噪声来源互不相关,所以总噪声就等于其平方和再取平方根
对于特定的拍摄条件,读出噪声和暗电流都是固定的。所以信号越强,其散粒噪声也越大,成为噪声的主要来源。但如果信号很弱,来自信号的散粒噪声就很小,此时读出噪声和暗电流的影响就不能忽略
ISO
【硬核】深入解读 ISO 和噪点 信噪比与动态范围 从 CMOS 传感器原理到实测数据
ISO 的原理为调整图像灰度以提升亮度,会损失一部分信息
理论光-数字转换流程为:光子 -> 光电转换(PD) -> 浮动扩散电容(FD,电荷转电压,效率为转换增益) -> 极源跟随器(SF,读取电压) -> 模拟放大(PGA) -> 模电转换(ADC) -> 数字信号
弱光时调整 ISO,噪声简要分类
- 非均匀相应噪声:制造缺陷,与光强成正比影响高曝光部分,弱光时基本忽略不计
- 散粒噪声:光强和光圈决定,影响正常曝光部分,光强越大信噪比越低。ISO 调整通光亮不变
- 读出噪声:影响低曝光部分,基本不变,除了佳能都很小!。前端读出噪声为 FP、SF 部分产生,后端读出噪声为 PGA 和 ADC 产生
因此提亮 N 倍时提高 ISO 和后提增量增加的噪声也存在不同
- 提升 ISO:N x 前端读出噪声 + 后端读出噪声
- 后期提亮:N x ( 前端读出噪声 + 后端读出噪声 )
电路工作电压导致 ADC 接受输入的电压是固定的,因此当 PGA 放大电压时,FD 实际能被读取的电压上限降低了,而本底读出噪声(下限)不变。动态范围因此减少,最佳的动态范围出现在原生 ISO!
由此产生了一些概念
- ISOLESS: 低读出噪声的相机在增益提升突破某个临界点(应该是模拟增益)后,高 ISO 与低 ISO+后期提升亮度一致
- 高 ISO 降噪:在通光量一定(主要是弱光)的情况下,比起后期提升亮度(倍增了后端读出噪声),高 ISO 能更有效的降噪、吃满动态范围并提升信噪比
- 向右曝光(针对人眼): 调整曝光使得直方图在右方未被截断的情况下峰值偏右。提升暗部细节,减少彩色噪点,但是会确实高光细节,与宁欠勿曝不同。需要对动态范围进行取舍或多张照片合并
ISO 和暗电流调整
如何正确设置 Gain 和 Offset
首先,并不存在一个所谓的”最佳的 GAIN 和 OFFSET 值”, 例如不足的 AD 采样率(12 位或者 14 位),以及读出噪声随增益提高而降低的特性。我们需要稍微理解一下相机的读出噪声,满阱,系统增益,以及天光背景的光子噪声等,才能更好的帮助我们确定应该使用的 GAIN 和 OFFSET
GAIN 设置
如果您以前没有制冷 CMOS 相机的使用经验,那么我们建议您刚开始的时候,增益可以设置为”单位增益(Unity Gain)”。单位增益是指相机的系统增益为 1e/ADU 的时候的 GAIN 设置值,例如 QHY168C 的是 10,而 QHY367C 的则为 2800(见上表)。单位增益的设置也不必纠结一定要刚好是系统增益,增减一点影响其实并不大
单位增益并不是最好的设置,只是一个起始点。根据拍摄的具体情况,可再进一步确定是增加或者减少这个值。通常情况下,如果您的光学系统是快速光学系统,大光圈,例如 F2.2-F5 之间的望远镜,曝光时间又比较长,比如 5 分钟以上,同时又没有使用窄带滤镜,那么可以考虑进一步减少 GAIN. 以便获得更大的动态范围,更好的利用相机的满阱值,以避免恒星过曝。(过曝的恒星会导致星点肥大,同时恒星的颜色饱和度受到损失)
如果使用了窄带滤镜,或者望远镜焦比在 F6-F10,曝光时间又比较短,那么在曝光时间周期内接受到的光子数有限,这种情况下,您可以提高增益,以期充分发挥在 CMOS 高增益下读出噪声低的特性,提高目标的信噪比
| 使用情况 | 增益值 | 目的 |
|---|---|---|
| 入门值 | 系统增益 | 提供一个初始值给入门用户使用 |
| 使用快镜,曝光时间较长 | 降低增益 | 充分发挥动态范围,避免星点饱和 |
| 使用窄带,慢镜,曝光时间短 | 提高增益 | 光子数有限情况下,获得更低读出噪声 |
OFFSET 设置
OFFSET 的设置也并没有一个最佳值。OFFSET 设置的正确方法是:在某一个增益下,分别拍摄偏置场和暗场,然后观察图像的直方图分布
可以看到直方图分布是一个峰。通过改变 OFFSET,可以使得这个峰向左或者向右平移。我们需要确保整个这个峰都要大于 0,不能被 0 给截掉。同时,为了能有所冗余,因此需要比零略大一些,比如大 100 到几百个 ADU,甚至几千 ADU 都是可以的。但是也不能太大,否则会占用掉 0-65535 中有效的动态范围
需要注意,不同增益下,这个峰的宽度是不相同的,在高增益下这个峰就会变宽。因此在低增益下合适的 OFFSET 值,在高增益下未必合适。很可能由于这个峰变宽了导致这个峰的部分被 0 给截掉
进阶设置
CMOS 相机采样不足 16 位时,会导致 AD 的采样精度不能与 CMOS 的满阱电荷数很好的匹配。在低增益下,CMOS 的系统增益往往会达到若干个电子对应一个 ADU。这样会带来采样误差。损失了相机对信号强度的分辨能力
当提高增益的时候,CMOS 的系统增益值会降低,当达到某一个增益时,对应 1e/ADU,这就是系统增益。但是提高增益会带来一个问题,就是限制了输出图像的满阱电荷数。比如 12 位的 CMOS,当系统增益为 1 的时候,图像达到饱和的时候,对应的满阱就只有 4096 电子。这样如果图像中有比较亮的目标,例如大多数的恒星等,就会出现饱和。特别是如果您的望远镜是快镜,或者曝光时间比较长,这个问题就会特别的突出。一旦恒星饱和,星点就会变粗,而且后期是无法补救的(除非用软件缩星大法)。同时,星点的颜色信息也会受到影响,星点的颜色饱和度会下降。最终图像感觉星点很粗,大部分星点很白。感觉图像非常干涩。因此这种情况下,只能通过降低增益,来获得图像更大的满阱
降低增益是在没有 16 位 AD 情况下采用的一个不得己的折中方法。这时候采样误差(量化噪声)会增加。但是,由于在长曝光,以及快镜下,像素的光子数比较多,光子数自身的量子噪声,会带来超过量化噪声的起伏(可以理解为一种在亮度上自然实现的“抖动”算法),因此量化噪声增加带来的影响会有所减小。通过一定的叠加,也可以在一定程度上弥补因为量化噪声引起的图像层次不够的问题
在光子数受限的情况下,例如在窄带摄影,曝光时间短,以及使用的镜子是“慢镜”的情况下,那么可以提高增益。因为这种情况下不容易出现目标饱和问题,同时,背景天光几乎没有,此时读出噪声和量化噪声是影响弱光探测能力的主要因素,提高增益获得更低的读出噪声和更低的量化噪声,对于提高信噪比是非常有意义的
影响信噪比的因素
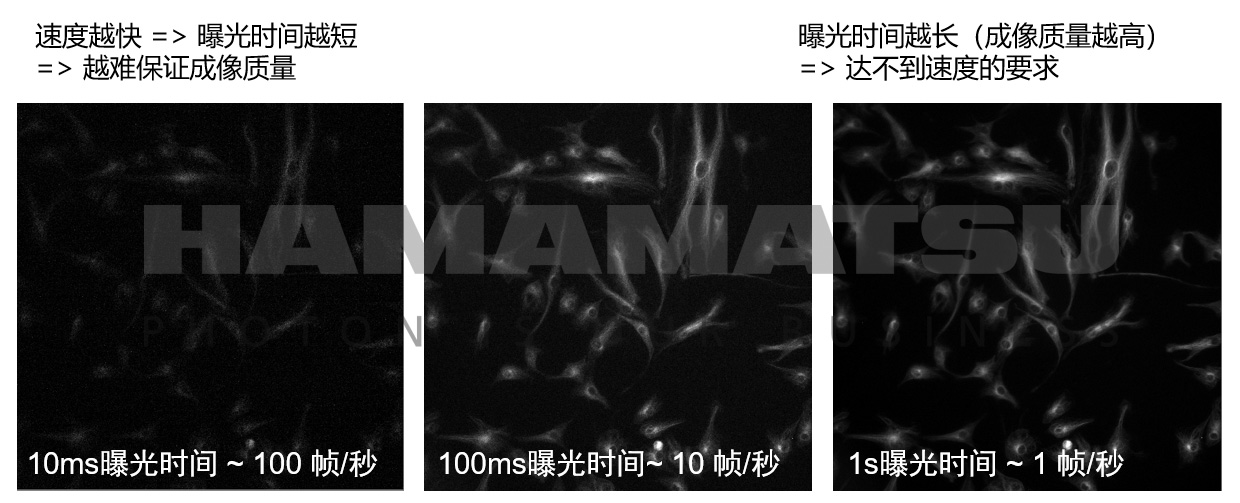
曝光时间
无论是从大家日常的理解还是从信噪比公式中,我们都很容易得出曝光时间(t)越长,信噪比越高的结论。然而,曝光时间长了,帧速就无法得到保障。曝光时间为 1 s 的时候,无论如何帧速也是无法超过 1 帧/秒的。所以,曝光时间的延长能够提升信噪比,但是会损失帧速。
光学系统的素质
对于同一样品发出的信号,光学系统直接影响到落到相机上的光信号强度(即公式中的"P")。对于显微成像而言,最常见的的提升方式就是选择更好的物镜;一般而言,数值孔径(NA)越大,物镜对信号的收集能力越强
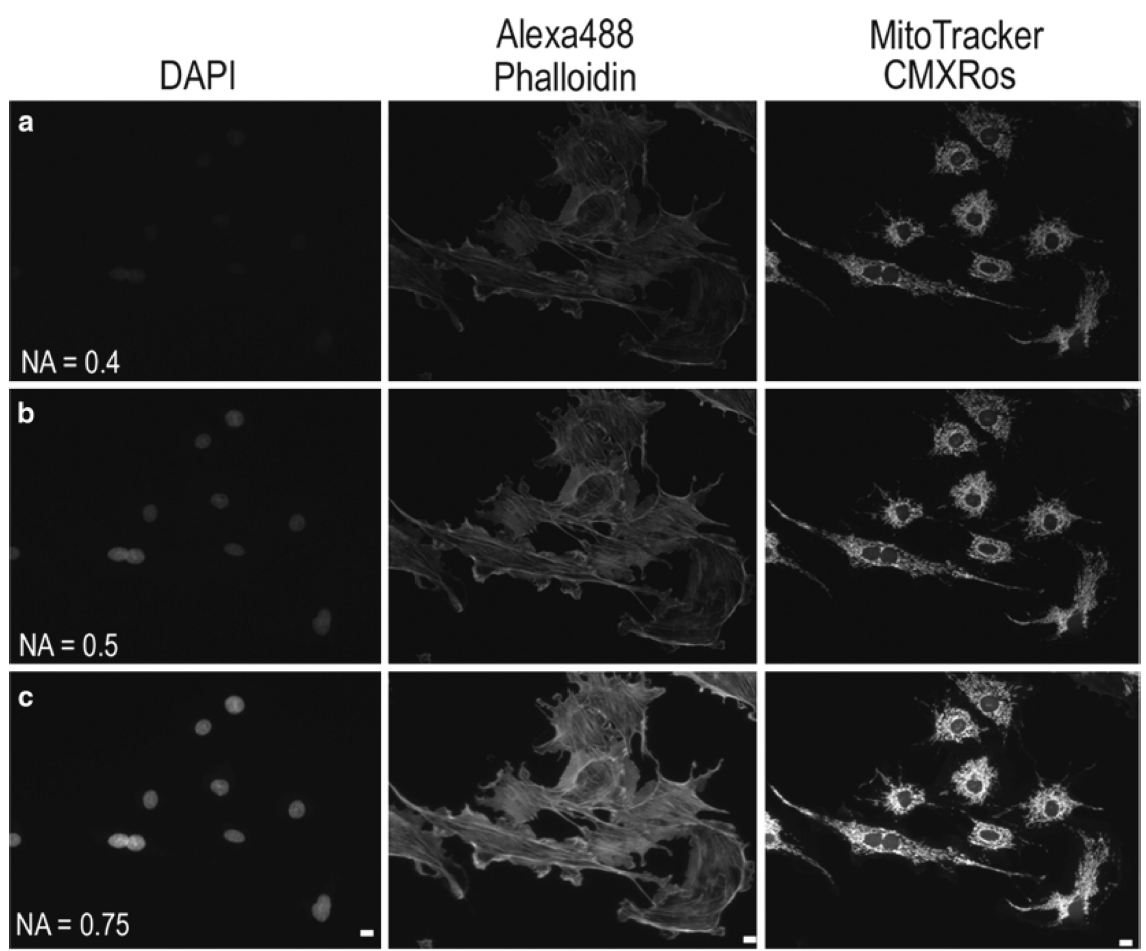
图 5. 不同数值孔径(NA)的物镜对成像效果的影响。(a) Plan 20×/0.4 NA; (b) UPlanFL N 20×/0.5 NA; (c) UPlanSApo 20×/0.75 NA.(参考用图,如若侵权请联系删除)
小结:用你能得到的最好的光学系统
像素尺寸
像素尺寸也是影响信噪比公式中的"P"(入射的光子数目);像素尺寸越大,落到一个像素上的光子就越多。在其他参数都一致的情况下,信噪比自然就越高。但过大的像素尺寸会损失相机的分辨率(相关讨论可参考 《相机像素尺寸(像元大小)和成像系统分辨率之间的关系 》
简而言之,在不调节光路仅仅更换相机的情况下(这是非常常见的场景),采用更大像素尺寸的相机在增加信噪比的同时往往会降低图像的分辨率(如图 6)。
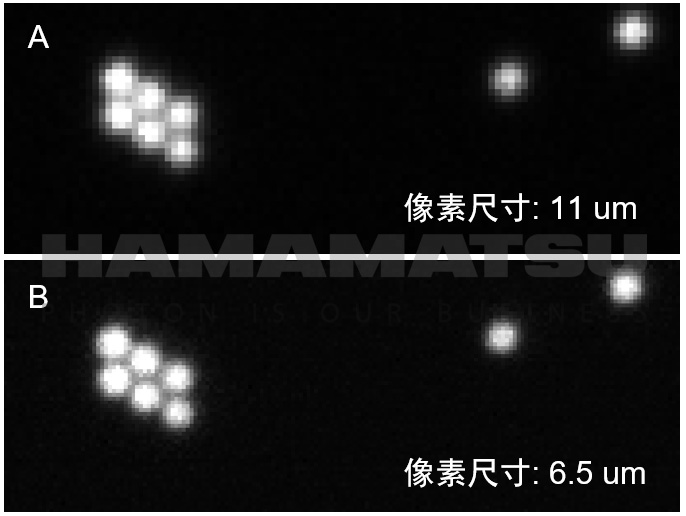
图 6. 不同像素尺寸相机对同一样品的成像效果对比。样品为直径 1μm 的荧光小球,放大倍数 60X
制冷与暗电流
由于暗电流(信噪比公式中的"D")来源于材料中电子的热运动,所以芯片温度越高,暗电流越大;对于同一芯片,近似的规律是温度每下降 10 度,暗电流减小一半。当前市场上的中高端科研相机的暗电流通常都很小,在 1 s 以下曝光时间时,暗噪声相比于读出噪声通常可以忽略。但由于暗电流随曝光时间会积累,所以越是长曝光时间的应用,制冷就越重要。
在实际选型中,不同类型的相机对制冷的要求也不尽相同:
- 对于 EMCCD 相机,像素尺寸通常较大(常见的为 13-16 μm),每个像素上产生的暗电流本就较多,而且 EMCCD 中的暗电流还会和信号一起被增益放大,所以用制冷压制 EMCCD 相机的暗电流产生尤其重要。因为这些原因,主流的 EMCCD 相机制冷温度都在-50 ℃ 以下
- 而对于 sCMOS 相机,不仅像素尺寸会较小一些(常见的为 6.5 μm),也没有额外的增益,所以对制冷的要求就相对低一点。
从图 7 中可以看到,在 sCMOS 相机中,制冷温度的具体高低影响不是那么明显,但有没有制冷对暗噪声的表现影响很大(图 7-A 是没有制冷的相机,图 7-B,C,D 都是有制冷的)。这是因为,一旦没有制冷,相机的芯片工作温度并不是简单的室温,而通常高达 60-70 ℃,在长时间曝光中(如图 7 中的 10 s 曝光时间),其暗电流自然就会高到不可忽视。
笔者在平时工作中,就曾经有过两个有趣的相关经历。第一个是刚接触科研相机时,看到许多诸如室温下 10 ℃(-10 ℃ from ambient temperature)的相机,表示不可理解,觉得"就 10 度的制冷,这有啥用?"。第二个是滨松有一款面向产业客户的板级 sCMOS 相机 C11440-62U,其制冷温度为室温上 10 ℃(+10℃ from ambient temperature),刚看到参数的时候也是小小疑惑了一把。其实当年产生这样的疑惑,就是因为没有意识到如果相机没有制冷,实际的工作温度将远超室温这一点。
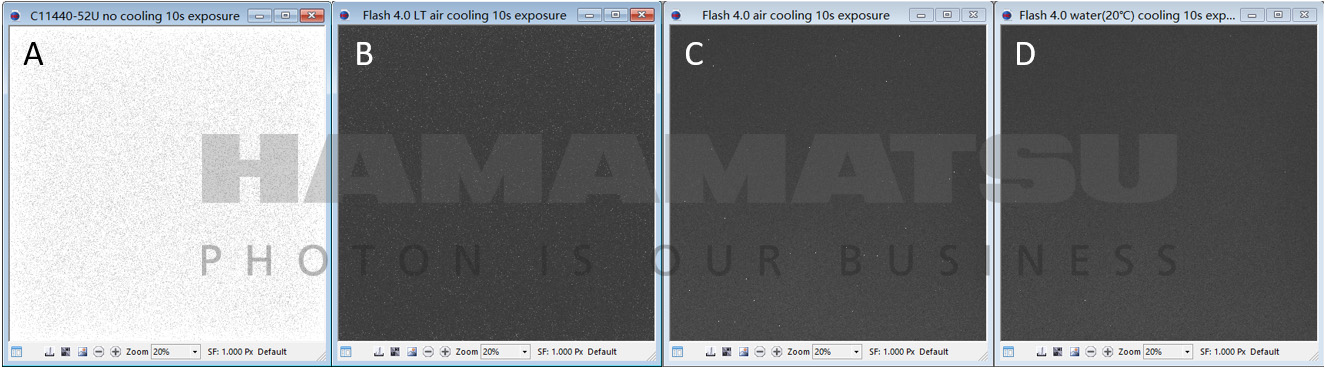
图 7. 冷却对相机的影响。四张图片来自于四台相机,均采用 10 s 的曝光时间,LUT 设置成一样。这四台相机采用了同样的芯片,但制冷温度不同。从左至右依次为:(a) 没有制冷(C11440-52U);(b) 制冷温度为 10 ℃(C11440-42U);(c) 制冷温度为-10 ℃(C11440-22CU,风冷模式);(d) 制冷温度为-20 ℃(C11440-22CU,水冷模式)
小结:对于当今的高端相机,只要有制冷,暗电流都很小。
量子效率
量子效率(即信噪比中的 QE)为光子在相机像素上转换成为电子的比例。同样是 100 个光子落到一个像素上,QE 82%意味着相机能够转换得到 82 个电子;QE 72%则代表能转换得到 72 个电子。显然,QE 越高,相机的信噪比越高
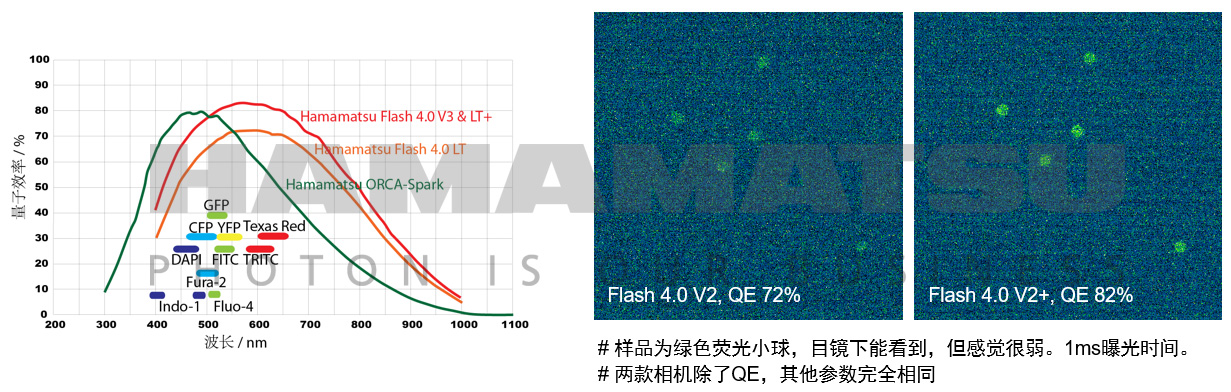
图 8. 量子效率对信噪比的影响
有关 QE,看参数时需要特别注意以下两点:
- QE 与波长是有关的,对于同一台相机,不同波长的 QE 并不相同。以 ORCA-Flash 4.0 V3 为例,在 600nm 的红光处其 QE 为最高的 82%,在 900 nm 的红外光处就只剩下了 25%左右
- 一般我们在高端科研相机的参数表中看到的都是量子效率峰值——也就是相机最灵敏的波长所对应的 QE。但是,不同相机/芯片的量子效率峰值所对应的波长并不一样,所以如果确切的知到自己信号的波长/颜色,最好能够确认下相机在对应波长下的 QE,而不是简单地比较量子效率峰值
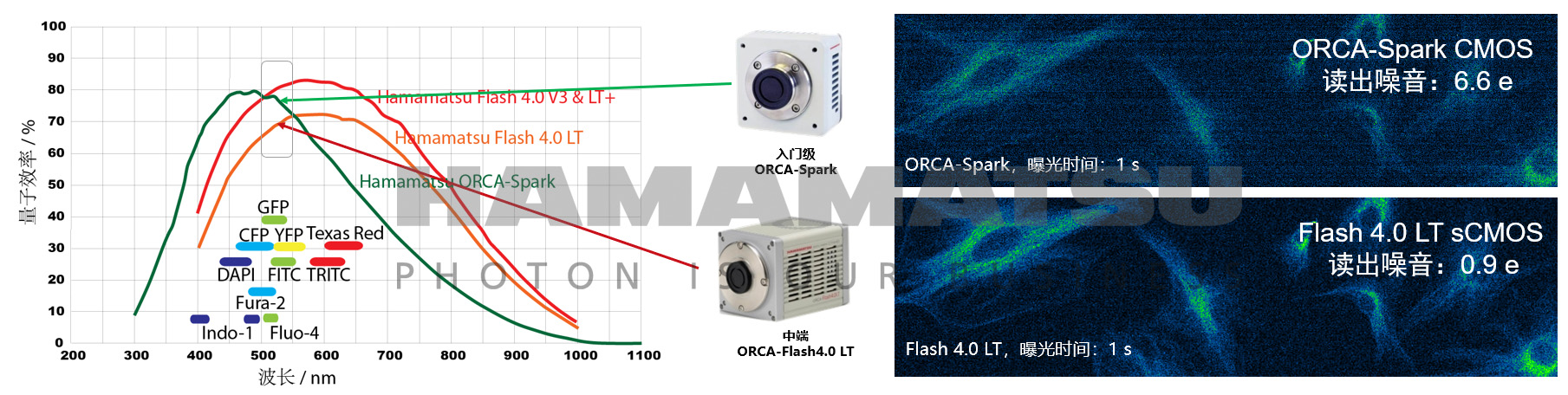
如图 9 中左图所示,ORCA-Spark 的峰值波长在 450-500 nm 之间,QE 峰值为 80%;而 Flash 4.0 LT 的峰值波长在 550-600 nm 之间,QE 峰值为 72%。虽然 ORCA-Spark 的量子效率峰值更高,但如果针对红色荧光,Flash 4.0 LT 的 QE 反而更好
小结:QE 很重要,但 QE 峰值更多是个参考,查到关注波长的 QE 值非常关键
读出噪声(R)
在信号较弱的成像中,来自信号的散粒噪声较小;而暗电流的散粒噪声(即暗噪声)在当前的高端科研相机都是很低的,在曝光时间 1s 这个量级甚至更短的时候,暗噪声通常可以忽略;此时读出噪声(即信噪比公式中的"R")就称为特别需要考量的因素了
对于同样的芯片,读出噪声的大小与读出速度有关,无论对于 CCD 相机还是 sCMOS 相机,读出速度越快,读出噪声越高。而 sCMOS 相对于 CCD 的一个核心优势,就是高速读出时依然能够保持极低的读出噪声
读出噪声的重要性也使得其和 QE 一起变成了相机被重点关注的两个参数。单纯考察两者中的一个优势并不能正确预测成像的信噪比。如图 9 所示,同样拍一个绿色荧光样品,QE 较高的 ORCA-Spark 成像质量却不如 ORCA-Flash 4.0 LT,就是因为 ORCA-Flash 4.0 LT 的读出噪声较低,综合考虑时 ORCA-Flash 4.0 LT 的信噪比更好
实践
常见场景,感觉白天拍摄压力不大,晚上比较麻烦
- 星轨:单张 30s,60 分钟左右
- 星河:单张,考虑 500 准则,曝光时间长了就拉丝
- 赤道仪:单张 5-15 分钟,一般持续数小时,星河相对静止
降噪
拍摄方式
- 降噪方式
- 机内降噪:机内降噪分为高 ISO 降噪和长曝光降噪,高 ISO 降噪只适用于 JPEG 格式,而且损失细节,对 RAW 格式不起作用。长曝光降噪对减少噪点有一定作用,但是拍摄时间会增加一倍。例如:打开长曝光降噪功能,30 秒曝光,之后相机马上会进行 30 秒降噪;如果五分钟曝光,就意味着要再等待五分钟降噪时间。所以如果计划拍摄多张堆栈降噪,不可同时开启长曝光降噪功能,否则拍摄间隔时间过长,后期图像无法对齐
- Adobe Camera Raw /Lightroom 降噪:Adobe Camera Raw (ACR) 和 Lightroom 的降噪设置和参数是一致的,一般情况下,彩色噪点的参数默认设置不需要更改,明度噪点的参数不超过 20,过高的参数会影响图像的锐度和细节。
- 插件降噪:Nik Dfine, Noiseware, Topaz Denoise 都是不错的降噪插件,界面均提供了更为精细的手动选项,操作简单,其中 Nik Dfine 可以免费下载使用
- 多张平均值堆栈降噪:文中提及的所有降噪处理中,这是一种操作复杂但是效果最好的方法,这种技术在深空摄影中早已被广泛使用。机位不动的情况下,连续拍摄 6-10 张,堆栈的照片越多效果越好,但是它的效应是递减的,前四张照片堆栈降噪后画质大幅提升,5-6 张以后的效果就没有那么明显了,所以没有必要耗费时间拍摄太多张,我通常用 4-6 张堆栈降噪。由于星空的相对转动,要利用蒙版分别对天空和地面降噪,否则地面对齐后,星星就成了拉线状
- 拍摄暗场降噪:这种降噪方式主要针对长时间曝光产生的热噪点,拍摄完成后,在同一环境,扣上镜头盖,使用相同参数再拍摄一张暗场照片。拍出的照片就是一张全黑图片,但仍会有热噪点的的彩色亮点。利用热噪点是固定噪点的特性, 在 Photoshop 中导入两张照片,正常照片在下,暗场照片在上,然后的图层模式选择“差值”,就可去除热噪点。注意:暗场虽然只是一张全黑的照片,但必须和其它照片在同一时段同一环境拍摄,因为热噪点的产生和拍摄环境温度以及传感器温度有直接关系
星空摄影 && 天文摄影
深空摄影需要长时间曝光,大概时长为 30s,多张重合。需要制冷保证低噪声、低暗电流
光圈越大,离轴光线越多,成像效果越有问题
拍摄内容
亮场(light)
所拍摄含有天体本身的原图。一般是一组图像,尽可能单张长曝光(根据所用设备,以不拖影为准),张数越多越好,用来后期叠加
暗场(darks)
拍摄完亮场后立刻拍摄。方法是保持和亮场同样的参数(快门、光圈、焦距、ISO)和设备,仅盖上镜头盖拍摄,数量一般是亮场的一半及一上。为了保持 cmos 相似的温度状态,拍完一组亮场最好相应拍摄一组暗场
上面所说,深空天体需要长曝来叠加每个像素点的有效数据,在有效数据增加的同时,热噪声也随曝光时长被叠加进来。暗场主要是用来后期去除图像上的热噪声
偏置场(biases)
盖上镜头盖,调整相机至最短曝光时间,其余不变,拍摄亮场一半以上的图像
因为内部电路电流的干扰,相机在无信号(光子)输入,极短曝光下也会呈现出特殊的条纹图案,即为相机偏置图案,反映的是相机固有电路的干扰噪声。每次开机后偏置电流噪声可能会变化,所以偏置场最好也和亮场同时拍摄
平场(flats)
打开镜头盖,维持焦段、ISO、光圈不变,对着亮度均匀的物体(平场板、照亮的白墙、阴天的天空 etc)调整曝光至不过曝,拍摄一组平场,数量也是亮场一半以上
拍摄技巧
如果非追踪的情况下要不拉线,需要 500/400 准则。快门时间小于
500 / 等效焦距SNPF 法则
(35 × 光圈 + 30 × 像素密度) / 焦距,更加准确。像素密度为传感器以毫米为单位的宽度 ÷ 以像素为单位的宽度 × 1000,这里的单位为微米
IMX183(5472 × 3648, 1 寸,像素密度 2.4um,原生 ISO 125) + 佳能 24-105 镜头,f4 光圈
500 法则:500/105/2.7=1.76,NPF 法则为:(35x4+30x2.4)/105/2.7=0.75
镜头起步推荐16-35mm f/2.8、14-24mm f/2.8,定焦推荐24mm f/1.4、35mm f/1.4。为了追求更优异的画质,选择的是适马的14mm f/1.8 art和适马20mm f/1.4 art以及适马14-24mm f/2.8 art
以 14~24mm 焦段为例,在没有赤道仪的情况下,常用的星空拍摄的参数组合:
| 光圈 | 快门时间 | ISO |
|---|---|---|
| F/1.4 | 15s~20s | iso1600~iso2500 |
| F/2 | 20s~25s | iso2000~iso3200 |
| F/2.8 | 20~30s | iso3200~iso6400 |
| F/4 | 25s~30s | iso3200~iso12800 |